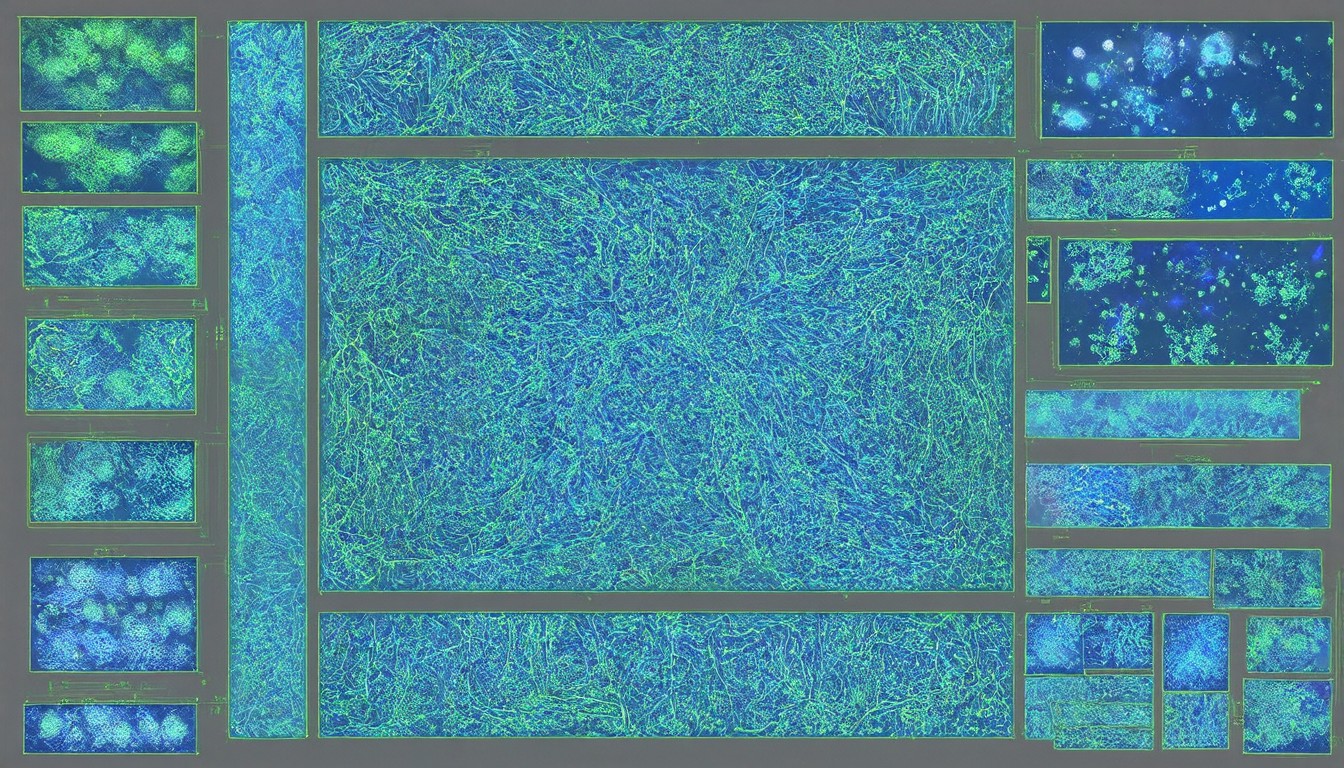
An Overview of Early Vision in InceptionV1
An overview of all the neurons in the first five layers of InceptionV1, organized into a taxonomy of 'neuron groups.'
InceptionV1, introduced in 2014 by Google's DeepMind, is a seminal model in the field of deep learning, particularly in computer vision. This architecture, designed by researchers Christian Szegedy, Wei Liu, Yangqing Jia, Pierre Sermanet, Scott E. Reed, Dragomir Anguelov, and Dmitry Erhan, revolutionized image classification by achieving state-of-the-art performance with fewer parameters than its predecessors. One of the key features of InceptionV1 is its innovative use of "inception modules," which combine multiple convolutional layers of different filter sizes to capture a wide range of spatial patterns.
To understand the inner workings of InceptionV1, let's delve into the first five layers of the network, which form the foundation of its architecture. These layers are composed of neurons that process visual information, and by organizing them into "neuron groups," we can gain insights into how the network learns and processes features.
The first layer of InceptionV1 is a convolutional layer with 7x7 filters and a stride of 2, which reduces the input image size by half. This layer is followed by a 1x1 convolutional layer, known as the "reduction layer," which projects the number of filters from 96 to 128. The reduction layer is crucial for reducing computational complexity while maintaining the network's capacity to learn complex representations.
The second layer introduces the first inception module. This module consists of several parallel branches, each with a different set of convolutional layers. The branches include 1x1, 3x3, and 5x5 convolutions, as well as a max-pooling operation with a 3x3 window and a stride of 2. The outputs of these branches are concatenated and passed through a 1x1 convolutional layer to reduce the dimensionality back to 128 filters. This modular design allows the network to capture a variety of spatial patterns, from small local details to larger contextual information.
The third layer is another inception module, similar to the second layer, but with an additional 5x5 convolutional branch. This expansion increases the network's ability to detect higher-level features while maintaining computational efficiency. The outputs of the third inception module are then passed through a 3x3 average pooling layer, which reduces the spatial dimensions and helps in transitioning to fully connected layers.
The fourth layer is a 3x3 average pooling layer that further reduces the spatial dimensions of the feature maps. This layer is followed by a 1x1 convolutional layer, which projects the number of filters from 128 to 832. This expansion in the number of filters prepares the network for the fully connected layers that follow.
The fifth layer is a fully connected layer with 1024 neurons, which processes the high-level features extracted by the previous layers. This layer is crucial for classifying the input image into one of the 1000 classes in the ImageNet dataset.
Organizing the neurons in the first five layers of InceptionV1 into neuron groups provides a structured way to analyze the network's architecture. These groups include convolutional layers, inception modules, pooling layers, and fully connected layers. Each group plays a distinct role in the network's ability to learn and represent visual information.
In conclusion, InceptionV1's architecture, particularly its first five layers, is a testament to the ingenuity of deep learning. By organizing neurons into well-defined groups, we can better understand how the network processes visual information and captures hierarchical features. This structured approach not only enhances our comprehension of the model but also serves as a foundation for future research and architectural innovations in computer vision.